Crowbits-Laser Ranging Sensor
Description¶
If you want to measure something more accurate and faster. This module fully meets the requirements. And the specific crowtail interface will provide convenience for us to use it with Arduino. The VL53L0X is a new generation Time-of-Flight (ToF) laser-ranging module housed in the smallest package on the market today, providing accurate distance measurement whatever the target reflectances unlike conventional technologies. It can measure absolute distances up to 2m, setting a new benchmark in ranging performance levels, opening the door to various new applications. The VL53L0X integrates a leading-edge SPAD array (Single Photon Avalanche Diodes) and embeds ST’s second generation FlightSenseTM patented technology. The VL53L0X’s 940nm VCSEL emitter (Vertical Cavity Surface-Emitting Laser), is totally invisible to the human eye, coupled with internal physical infrared filters, it enables longer ranging distance, higher immunity to ambient light and better robustness to cover-glass optical cross-talk.

Features¶
- Fully integrated miniature module
- Advanced embedded optical cross-talk compensation to simplify cover glass selection
- Class 1 laser device compliant with latest standard IEC 60825-1:2014 - 3rd edition
Specification¶
- Interface Type: I2C
- Operating Voltage: 3.3V DC
- Dimensions: 56(L)*56(W)*13(H)mm
Applications¶
- User detection for Personal Computers/ Laptops/Tablets and IoT (Energy saving)
- Robotics (obstacle detection).
Usage¶
Usage The following sketch demonstrates a simple application of the module.
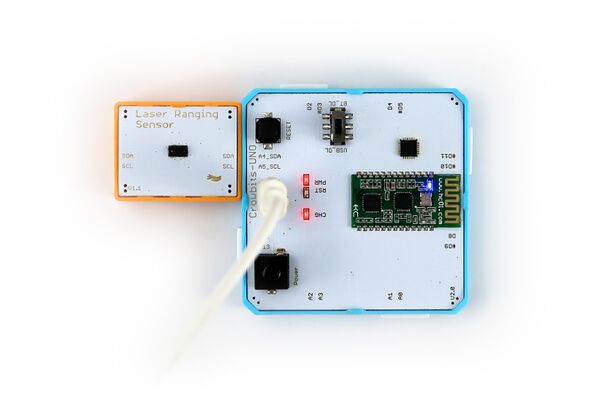
1. You need to prepare a Crowbits motherboard, such as Crowbits-UNO board.
2. Connect the module to the I2C interface of the Crowbits-UNO board, as shown in the figure:
3. Upload the following code to the Crowbits-UNO board.
//the original code by Ted Meyers
//posted here: https://groups.google.com/d/msg/diyrovers/lc7NUZYuJOg/ICPrYNJGBgAJ
#include <Wire.h>
#define VL53L0X_REG_IDENTIFICATION_MODEL_ID 0xc0
#define VL53L0X_REG_IDENTIFICATION_REVISION_ID 0xc2
#define VL53L0X_REG_PRE_RANGE_CONFIG_VCSEL_PERIOD 0x50
#define VL53L0X_REG_FINAL_RANGE_CONFIG_VCSEL_PERIOD 0x70
#define VL53L0X_REG_SYSRANGE_START 0x00
#define VL53L0X_REG_RESULT_INTERRUPT_STATUS 0x13
#define VL53L0X_REG_RESULT_RANGE_STATUS 0x14
#define address 0x29
byte gbuf[16];
void setup() {
// put your setup code here, to run once:
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(9600); // start serial for output
Serial.println("VLX53LOX test started.");
}
void loop() {
Serial.println("----- START TEST ----");
test();
Serial.println("----- END TEST ----");
Serial.println("");
delay(1000);
}
void test() {
byte val1 = read_byte_data_at(VL53L0X_REG_IDENTIFICATION_REVISION_ID);
Serial.print("Revision ID: "); Serial.println(val1);
delay(1000);
val1 = read_byte_data_at(VL53L0X_REG_IDENTIFICATION_MODEL_ID);
Serial.print("Device ID: "); Serial.println(val1);
delay(1000);
val1 = read_byte_data_at(VL53L0X_REG_PRE_RANGE_CONFIG_VCSEL_PERIOD);
Serial.print("PRE_RANGE_CONFIG_VCSEL_PERIOD="); Serial.println(val1);
Serial.print(" decode: "); Serial.println(VL53L0X_decode_vcsel_period(val1));
delay(1000);
val1 = read_byte_data_at(VL53L0X_REG_FINAL_RANGE_CONFIG_VCSEL_PERIOD);
Serial.print("FINAL_RANGE_CONFIG_VCSEL_PERIOD="); Serial.println(val1);
Serial.print(" decode: "); Serial.println(VL53L0X_decode_vcsel_period(val1));
delay(1000);
write_byte_data_at(VL53L0X_REG_SYSRANGE_START, 0x01);
byte val = 0;
int cnt = 0;
while (cnt < 100) { // 1 second waiting time max
delay(10);
val = read_byte_data_at(VL53L0X_REG_RESULT_RANGE_STATUS);
if (val & 0x01) break;
cnt++;
}
if (val & 0x01) Serial.println("ready"); else Serial.println("not ready");
read_block_data_at(0x14, 12);
uint16_t acnt = makeuint16(gbuf[7], gbuf[6]);
uint16_t scnt = makeuint16(gbuf[9], gbuf[8]);
uint16_t dist = makeuint16(gbuf[11], gbuf[10]);
byte DeviceRangeStatusInternal = ((gbuf[0] & 0x78) >> 3);
Serial.print("ambient count: "); Serial.println(acnt);
delay(1000);
Serial.print("signal count: "); Serial.println(scnt);
delay(1000);
Serial.print("distance "); Serial.println(dist);
delay(1000);
Serial.print("status: "); Serial.println(DeviceRangeStatusInternal);
delay(1000);
}
uint16_t bswap(byte b[]) {
// Big Endian unsigned short to little endian unsigned short
uint16_t val = ((b[0] << 8) & b[1]);
return val;
}
uint16_t makeuint16(int lsb, int msb) {
return ((msb & 0xFF) << 8) | (lsb & 0xFF);
}
void write_byte_data(byte data) {
Wire.beginTransmission(address);
Wire.write(data);
Wire.endTransmission();
}
void write_byte_data_at(byte reg, byte data) {
// write data word at address and register
Wire.beginTransmission(address);
Wire.write(reg);
Wire.write(data);
Wire.endTransmission();
}
void write_word_data_at(byte reg, uint16_t data) {
// write data word at address and register
byte b0 = (data &0xFF);
byte b1 = ((data >> 8) && 0xFF);
Wire.beginTransmission(address);
Wire.write(reg);
Wire.write(b0);
Wire.write(b1);
Wire.endTransmission();
}
byte read_byte_data() {
Wire.requestFrom(address, 1);
while (Wire.available() < 1) delay(1);
byte b = Wire.read();
return b;
}
byte read_byte_data_at(byte reg) {
//write_byte_data((byte)0x00);
write_byte_data(reg);
Wire.requestFrom(address, 1);
while (Wire.available() < 1) delay(1);
byte b = Wire.read();
return b;
}
uint16_t read_word_data_at(byte reg) {
write_byte_data(reg);
Wire.requestFrom(address, 2);
while (Wire.available() < 2) delay(1);
gbuf[0] = Wire.read();
gbuf[1] = Wire.read();
return bswap(gbuf);
}
void read_block_data_at(byte reg, int sz) {
int i = 0;
write_byte_data(reg);
Wire.requestFrom(address, sz);
for (i=0; i<sz; i++) {
while (Wire.available() < 1) delay(1);
gbuf[i] = Wire.read();
}
}
uint16_t VL53L0X_decode_vcsel_period(short vcsel_period_reg) {
// Converts the encoded VCSEL period register value into the real
// period in PLL clocks
uint16_t vcsel_period_pclks = (vcsel_period_reg + 1) << 1;
return vcsel_period_pclks;
}
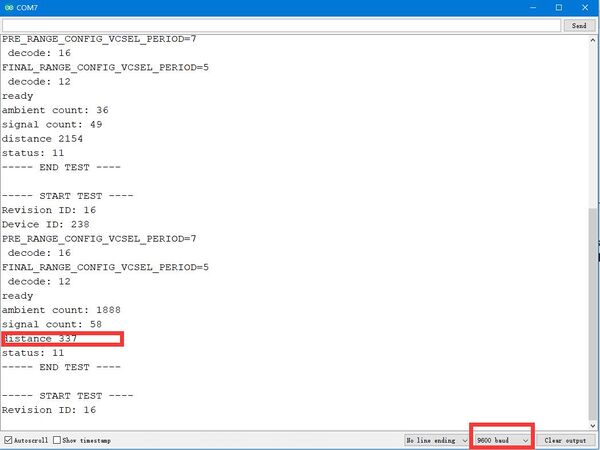
4. After the upload is successful, open the serial port monitor, the baud rate is set to 9600. Place an object in front of the sensor, the serial port will show the distance of the object, as shown in the figure: