Crowtail- Analog Gyro
Description¶
Crowtail- Analog Gyro is based on an angular velocity sensor(Murata-ENC-03R) that uses the phenomenon of Coriolis force.which is generated when a rotational angular velocity is applied to thevibrator.One sensor detects rotation on one axis.
Model: CT0015AG
Feature¶
- Standard Crowtail Interface
- Input Voltage:5V
- Light Weight
- High Speed
- Measure X-axis Angular Velocity
- Dimensions(mm):20.0(L)x20.0(W)x6.8(H)
Usage¶
The module detects one-axis rotation with analog signal.
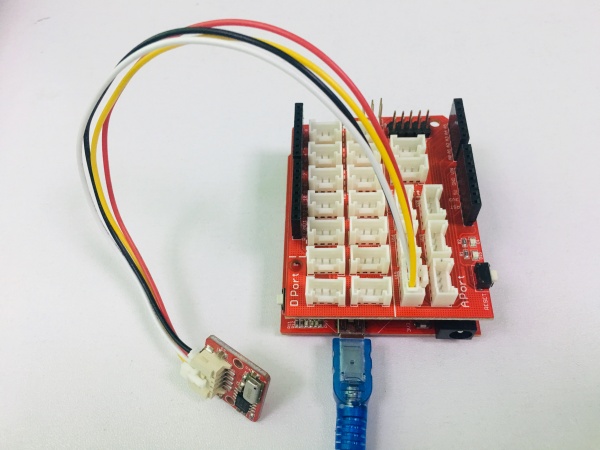
1.Hardware Connection
Connect it to A0 port of Crowtail - Base Shield,Plug the Grove - Base Shield into Arduino/Crowduino and connect them to PC using a USB cable.
2.Upload the below code.
int sensorPin = A0; // select the input pin for the sensor
float reference_Value=0;
int sensorValue = 0; // variable to store the value coming from the sensor
void setup() {
int i;
float sum=0;
pinMode(sensorPin, INPUT);
Serial.begin(9600);
Serial.println("Please do not rotate it before calibrate!");
Serial.println("Get the reference value:");
for(i=0;i<1000;i++)
{
// read the value from the sensor:
sensorValue = analogRead(sensorPin);
sum += sensorValue;
delay(5);
}
reference_Value = sum/1000.0;
Serial.println(reference_Value);
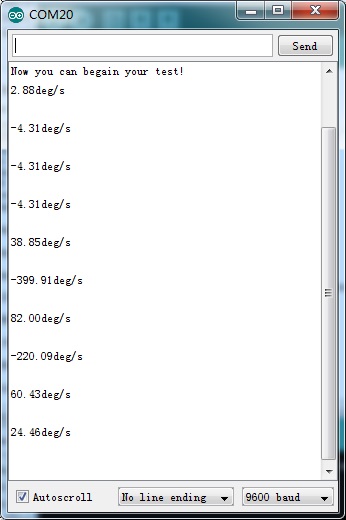
Serial.println("Now you can begain your test!");
}
void loop()
{
double angularVelocity;
sensorValue = analogRead(sensorPin);
angularVelocity =((double)(sensorValue-reference_Value)*4930.0)/1023.0/0.67; //get the angular velocity
Serial.print(angularVelocity);
Serial.println("deg/s");
Serial.println(" ");
delay(500);
}
3.Now, it is time to the calibration. Put the sensor on your desk horizontally, and then press the Reset button on the Crowduino, and then Open the serial tool:
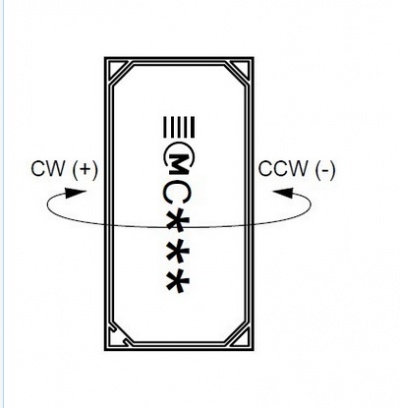
4.As you see the "Now you can begin your test", that means the calibration done. You can use the sensor now. Rotating direction can reference the following picture: