Topics
View All
PCB
DIY Electronics
Arduino

ESP
PCB Assembly

LoRa

Raspberry Pi
3D Printing

Machine Learning & AI
IoT

Acrylic Cutting

Display
Keyboards
Lights

Gaming

Boards & Shields
Health & Medical Devices

Kits

Power Supply

Automotive

CNC
Biometric
Robotics

Prototyping & Fabrication
Actuators
Sensors
Camera

Security
Wearables

Music
Christmas Contest
We Recommend
What kind of projects would we recommend?
- Great Content: e.g. Introduction / Features / Tutorials / Videos
- Complete Files: e.g. Gerber / Bom / Circuit / Schematic / CAD
- Profound Concepts: e.g. Innovative / Practical / Social contribution

Bitcoin Monitor with CrowPanel 5.79″ and GxEPD2
 profe Tolocka
profe Tolocka
profe Tolocka

Smart Solar Plant
 ESC Vlogs
ESC Vlogs
ESC Vlogs

AI-based Aquatic Ultrasonic Imaging & Chemical Water Testing
Kutluhan Aktar
Most Popular
View All
G E N E S I S - Modular Electronics for Innovators
 Povilas Dumcius
Povilas Dumcius
Povilas Dumcius

FarmGuard : Farm Security with Cellular IoT and AI
Samith TM
Samith TM

MAKE 8CH RC TRANSMITTER AND RECEIVER USING STM32 AND NRF24L01
 DIY TECHOS
DIY TECHOS
DIY TECHOS

Cosmic Ray Muon Detector
 Robert Hart
Robert Hart
Robert Hart
Latest
View All
Project #25 - Movement - ADXL345 - Mk07
 Luc Paquin
Luc Paquin
Luc Paquin

Review: CrowPanel E-Paper 5.79” with Esp32 S3
 TMVTech
TMVTech
TMVTech

Weather Clock using Elecrow CrowPanel ESP32 4.2” E-Paper HMI
FUSION AUTOMATE

The most simple and powerful language for automation.
 Theremino Automation
Theremino Automation
Theremino Automation
Dynamic decoration with LEDs and more
 cris
cris
cris
Project #15: Environment – Crowtail Moisture Sensor – Mk22
Luc Paquin
Luc Paquin
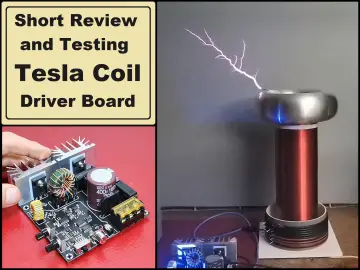
Exploring the Tesla Coil Driver Board, Full Review & Test Re
 Mirko Pavleski
Mirko Pavleski
Mirko Pavleski
Video Tutorials
View All

1 Minute Guide to Learn How Arduino Uno Works

CrowPanel ESP32 Display Tutorials

Elecrow Acrylic Laser Cutting Service

Elecrow PCB Manufacturing and Assembly Process
Blogs
View All
Congratulations! Announcing the Christmas Contest Winners! (2024)

Elecrow Project Commercialization Model – A New Way to Share, Learn, and Earn!

Comparison Between Raspberry Pi CM4 and CM5
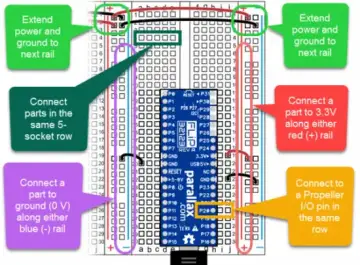
Learn how to use a breadboard in minutes

Share and explore more open source hardware projects!