Currency
Toggle Nav

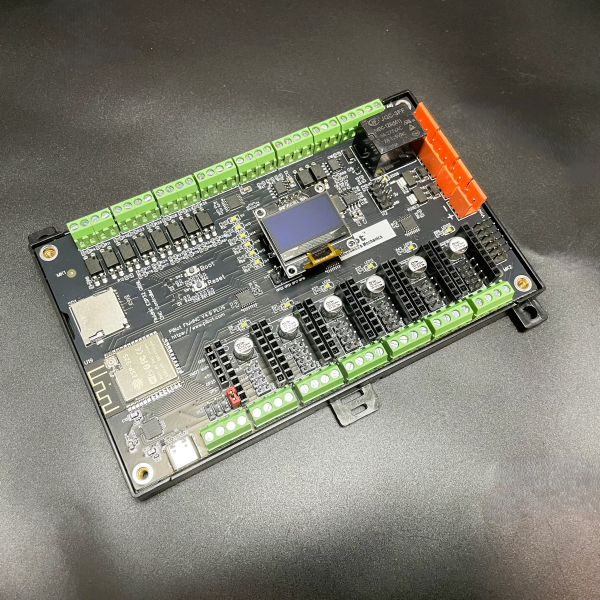



PiBot FluidNC ESP32 GRBL CNC Controller V4.9 Plus B
was
$59.99
Special Price
$49.99
Availability:
In stock
SKU
CQY241126PB
Weight
200g
Related Products:




×
 Add to cart successfully!
Add to cart successfully!
Customers Who View This Item Also Bought
This was designed to control a wide variety of CNC machines. It can control 6 motors and many spindle and laser types. It is very easy to configure. You never have to compile any software. All configuration, upgrading, etc can be done via web browser.
order from elecrow you can get a free antenna
The 2025 Lastest Version is V4.9 Plus B Now in Stock!
2024 V4.9P upgrade to 2025 V4.9PB,
Compared to the V4.9P version from 2024, V4.9PB have incorporated a voltage level selection function, allowing users to choose either 3.3V or 5V as the onboard drviers control voltage.
We have fixed some pin setting errors in V4.9P, and as a result, it can now support TMC2130 and TMC5160 drivers. (the old 2024 version V4.9P can not support TMC drviers)
How to distinguish the new version:
A:The versions shipped in 2025 are all the new ones, which are silkscreened with "PiBot FluidNC V4.9 PLUS B".
B:Below the relay on the PCB, there is a 3-pin jumper cap labeled "Driver Logic Signal Level".
C:The V49PB adopts a new ESP32 original module, which is faster and more stable, thus requiring an extral antenna for WiFi connectivity.
In addition, the other V4.9PB functions remain largely the same as V4.9P. The old documentation for the 2024 V4.9P version can be obtained from the link below.
https://www.pibot.com/V4-9-Plus-2024-Version-old-Documentation
Review of Versions
Thank you all for your support and feedback. We continuously update and improve our products.
V4.6 (sold out)
V4.7 (sold out)
V4.8 (sold out)
V4.9A (sold out)
V4.9P (sold out)
V4.9P-B (New!!!!! in stock!!!!)
The V4.9P-B feature compare to the before:
1. To make it compatible with a 150 * 90 * 40mm box. ( it needs to be purchased separately)
2. Change the output connector to a screw method. (use the jumper opinion then can choose output model for extra driver or to motors via the capnut on or off)
3. Change the antenna to an external more faster and stable.
4. The main power supply and stepper motor power supply are input separately.
5. use the plug then can change the output for drivers or motors.
6. Supports onboard TMC2130 and TMC5160 drivers, as well as external TMC5160 drivers. (only for 2025 V49PB)
7. Procuring CP2102 chips from Silicon's official and authorized suppliers.
8. Procuring genuine ESP32 chips from Espressif's official suppliers ensures greater stability and reliability.



The V49 PLUS can adapt a 150 * 90 * 40mm box and use screw

What is it
This was designed to control a wide variety of CNC machines. It can control 6 motors and many spindle and laser types. It is very easy to configure. You never have to compile any software. All configuration, upgrading, etc can be done via web browser.
Designed for FluidNC ESP32 GRBL CNC.
Compatible with the FluidNC official original firmware, we provide yaml example configuration file.
- FluidNC Wiki
- https://www.pibot.com/dls/fluidnc/V49p-usb-driver-firmware-webui-yaml-example.zip
- https://www.pibot.com/dls/fluidnc/V49p-XYZABC-factory-test-V1.yaml
- https://www.pibot.com/dls/fluidnc/V49p-XYYZ-coolant-V1.yaml
- https://www.pibot.com/dls/fluidnc/V49PB-XYYZ-TMC2130-v1.yaml (only for V49P-B)
- https://www.pibot.com/dls/fluidnc/V49PB-XYYZ-TMC5160-v1.yaml (only for V49P-B)
- lastest Firmware: https://github.com/bdring/FluidNC/releases
Feature
- Integrated ESP32 (Programmed with FluidNC. Includes a generic configuration)
- (6) Motor connectors for external stepper drivers (5v signals). Each motor has separate step, direction and enable signals.
- Inputs for switches (limits, probes, control, etc)
- Communication Mode: USB Cable or Blue Tooth or WIFI
- Spindles (many types supported). Some multi-spindle arrangements are possible like RS485 & laser on the same machine.
- 0-10V controlled spindles with additional forward and reverse direction signals
- PWM Speed controllers with optional separate enable signals
- Relay (on/off) controlled spindles.
- BESC (Brushless Motor) based spindles
- Lasers with PWM and enable
- Unused spindle 5V outputs can be used for any output function (coolant, etc)
- Micro SD card socket for local storage of gcode files
- Module socket for GPIO extenders and Pendant interfaces.
- Compatible with PiBot Stepper Motor Driver Rev2.3 TOSHIBA TB6600 (3.3V 5V or Dgnd logic max Output 4.12 - 4.5A)
- Compatible with PiBot Isolated Relay Board Rev2.3
- Tested the on board TMC2130 Driver
- Tested the Extend TMC5160 Driver
How it works
Video Toturials for Step 0 ~ Step 4
Notice:We have Uploaded and tested the Firmware and WebUI before Shipped, If you have OLED, it will display when plugged in.
The V4.9 plus and V4.8A V4.9A is similar config, different is the v4.9 plus step/dir moedel onboard driver "MS3 pin" need set in yaml.
Video Toturials for Step5 (1)
Video Toturials for Step5 (2~3)
Step 0: Preparation: Download the following four files you need:
A. USB driver
B. ESP32 firmware
C. fluidnc web ui files: index.html and ico
D. YAML sample
Click here to download all at once.
If you need the latest software version, please download the latest release version from the fluidnc official website. We are compatible.
Step 1: Install USB driver
(1) Insert the file A prepared earlier into your computer.
(2) If not installed correctly, install manually.
(3) Open "My Computer," go to Device Manager, and navigate to COM ports.
(4) Update the driver, select "Install from Local," and choose all.
(5) After installation, a CP2102 will be displayed, remember this port number.
Step 2: Upload fluidnc-grbl firmware (Firmware upload)
(0) Connect via Type-C to your mainboard and power with 12V or 24V (theoretically, 9-30V is acceptable).
(1) Insert file B prepared earlier into your computer.
(2) Double click to open the WiFi version.
(3) If successful, it will install automatically; if not, press the boot button for three seconds and release to trigger automatic download.
(4) After download, select option 5.
(5) Disconnect power, wait for five seconds, then reconnect and restart the MCU.
- lastest Firmware: https://github.com/bdring/FluidNC/releases
Step 3: Upload files required for fluidnc-WEB interface (Install web UI)
(1) After restarting the MCU, you'll find fluidnc in your computer's WiFi network.
(2) Connect to it with password 12345678.
(3) Once connected, enter 192.168.0.1 in your browser.
(4) Upload the required files, do not interrupt the process.
(6) After upload, you'll see the option to enter the web-fluidnc interface.
Step 4: Upload YAML configuration file required for CNC and configure your network (Configure your machine)
(1) Inside the interface, click here to proceed.
(2) Upload the YAML file you need for testing purposes. After testing, modify it according to your CNC requirements using this template.
(3) Click "Set" when done.
(3) Here, you can also configure your LAN access, refer to details.
(4) Disconnect power, wait for five seconds, then reconnect and restart the mainboard.
(6) The mainboard is now ready to work. If you have OLED, you can see basic information.
Some example:
- https://www.pibot.com/dls/fluidnc/V49p-XYZABC-factory-test-V1.yaml
- https://www.pibot.com/dls/fluidnc/V49p-XYYZ-coolant-V1.yaml
- https://www.pibot.com/dls/fluidnc/V49PB-XYYZ-TMC2130-v1.yaml (only for V49P-B)
- https://www.pibot.com/dls/fluidnc/V49PB-XYYZ-TMC5160-v1.yaml (only for V49P-B)
Step 5: Hardware Test Example
(0) Mainboard pinout diagram.

(1) Relay // PWM // 0-10V output test example in default YAML configuration. (use webUI test)

By default, GPIO 26 serves as a relay output. You can also change its jumper to use it for input. Insert on the left for relay operation and insert on the right for terminal operation.
A. Open the webUI page.
B. Click the unlock button.
C. Enter M6 to display the default tool, T0 as a relay.
D. Enter M6 T0 to test PWM.
Enter M3 S255, you will hear a ticking sound, indicating it has started working.
Enter command M5 to stop.
E. Enter M6 T1 to test PWM.
You will see IO.4 port blinking.
F. Enter M6 T2 to test Laser.
You will see IO.12 port blinking.
G. Enter M6 T3 to test 0-10V.
You will see IO.13 port blinking.
H. Enter M6 T4 to test 485.
You will see IO.14 IO.15 port blinking.
Advanced Test 1: If you connect an oscilloscope, you will see the PWM waveform changing.
Advanced Test 2: If you connect an multimeter you will see the 0-10v voltage changing.
Advanced Test 3 If you connect a frequency converter via RS485, you will see the register value changing (or use MODBUS simulation)
(2) Internal drive schematic (using the YAML provided as a sample) (use openbuild control software test)
A. Stepper motor drive pin jumper settings as shown in the diagram:
B. V4.9P NOW Only support “en dir clk gnd model”, if you use TMC5160 please set to "en dir clk gnd" model,
C. V4.9PB support “en dir clk gnd model” and SPI model for TMC2130 OR TMC5160
Advanced Test 4: Use OpenBuild controller to test PROBE and limit switch triggering.
Advanced Test 5: Use OLED to test limit switch triggering.

YAML EXAMPLE:
stepstick:
step_pin: I2SO.10
direction_pin: I2SO.9
disable_pin: I2SO.8
ms3_pin: I2SO.11:high
##### stepstick MODEL can use for onboard driver output,
##### for example: A4988 MS1 MS2 can be set in the plugnut, and the ms3 can set in this yaml file such as "ms3_pin: I2SO.6:high"
##### notice: don't plug the capnut when use this model
##### the output signal from the TB4-Y IS "2B 2A 1A 1B"
(3) External drive schematic (using the YAML provided earlier as a sample)
A. It is recommended to use an independent power supply for external power.
B. Compatible with hardware REV2.3 relay.
C. Compatible with hardware REV2.3 TB6600 or DM420 driver etc.

YAML EXAMPLE:
standard_stepper:
step_pin: I2SO.2
direction_pin: I2SO.1
disable_pin: I2SO.0:low
##### standard_stepper MODEL can use for extend driver output
##### for example: plug on the capnut H4,
##### the output signal from the TB4-X IS "EN STP DIR GND" to driver
#####// for some extend driver need ":low" the en signal
#####//direction_pin is used to control the direction. You can invert the direction by changing the active state attribute (:high or :low)
Diagram of Driver Connection
Notice: en dir clk gnd model can not mix with the SPI model)
Normal STP/DIR DRVIER:
- some yaml example
- https://www.pibot.com/dls/fluidnc/V49p-XYZABC-factory-test-V1.yaml
- https://www.pibot.com/dls/fluidnc/V49p-XYYZ-coolant-V1.yaml
(1).png)
(1).png)
SPI TMC DRIVER
- some yaml example:
- https://www.pibot.com/dls/fluidnc/V49PB-XYYZ-TMC2130-v1.yaml (only for V49P-B)
- https://www.pibot.com/dls/fluidnc/V49PB-XYYZ-TMC5160-v1.yaml (only for V49P-B)
(1).png)
(1).png)
Others:
File 1: Board size.
.png)
File 2: Schematic diagram.
this is the V4.9PB, fix some spi pin bugs from the V4.9P

this is the v49p

File 3: antenna diagram.
https://www.pibot.com/cnc-laser-electronics/ipex-to-sma-external-antenna
The v4.9PB have not onboard antenna, so it need extral antenna. if remove it, the wifi signal may lose.
File 4: electronic box
https://www.pibot.com/cnc-laser-electronics/pibot-electronic-box-v4
.png)
File 5: OLED
https://www.pibot.com/pibot-controller-v4-oled-096
File 5: PiBot Isolated Relay Board Rev2.3
https://www.pibot.com/pibot-isolated-relay-board-rev2-3.html
Shipping List
- PiBot FluidNC GRBL CNC Controller Board Rev4.9 Plus B × 1
- EndStops x 3
Write Your Own Review