Currency
Toggle Nav

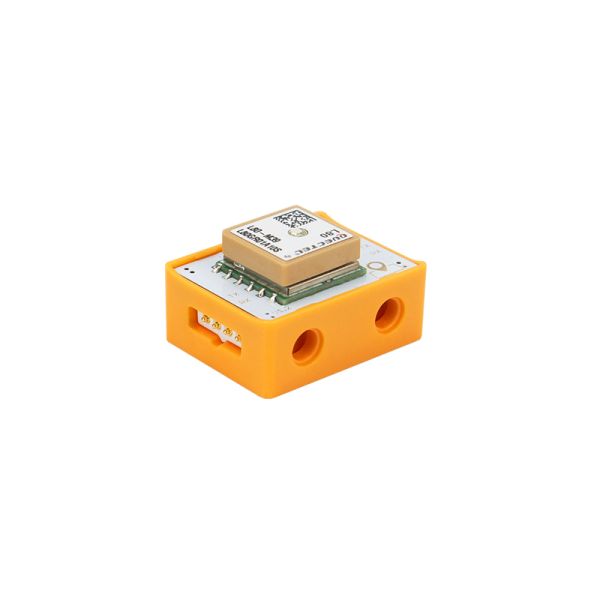



Crowbits-GPS
$13.90
Availability:
Out of stock
SKU
CRB0066S
Weight
15g

Related Products:




×
 Add to cart successfully!
Add to cart successfully!
Customers Who View This Item Also Bought
Frequently Bought Together






What is Crowbits-GPS?
Global Positioning System(GPS) is a high-precision radio navigation Positioning System based on airborne satellites. It can provide an accurate geographical location, vehicle speed and accurate time information anywhere in the world and in near-earth space.
How does it work?
Positioning principle
GPS positioning includes pseudorange single point positioning, carrier phase positioning and real-time differential positioning.
1.Pseudorange measurement and pseudorange single point positioning
Pseudorange measurement is to determine the distance from the satellite to the receiver, that is, the distance obtained by the propagation time of the ranging code signal transmitted by the satellite to the GPS receiver multiplied by the speed of light. Pseudorange method for single-point positioning is to use a GPS receiver to measure the pseudorange with more than 4 GPS satellites at a certain time, and the satellite's instantaneous coordinates obtained from satellite navigation messages, and use the distance intersection method to find the three-dimensional coordinates of the antenna in in the coordinate systemWGS-84.
2. Carrier phase measurement and carrier phase positioning
The carrier phase measurement is to determine the phase delay between the GPS satellite carrier signal and the receiver antenna. The ranging code and navigation message are modulated on the GPS satellite carrier. After receiving the satellite signal, the receiver first removes the ranging code and satellite message on the carrier to reacquire the carrier, which is called the reconstruction carrier. The GPS receiver compares the reconstructed satellite carrier with the local oscillator signal generated by the oscillator in the receiver through a phase meter to obtain the phase difference.
3. Real-time differential positioning
The principle of GPS real-time differential positioning is to place a GPS receiver (called a base station) on an existing precise geocentric coordinate point, use known geocentric coordinates and ephemeris to calculate the correction value of GPS observations, and sends the correction value to a GPS receiver in motion (called roving station) through radio communication equipment (called a data chain). The roving station uses correction values to correct its GPS observations to eliminate the above errors, thereby improving real-time positioning accuracy. There are many kinds of GPS dynamic differential methods, mainly including position differential, pseudorange differential (RTD), carrier phase real-time differential (RTK) and wide-area differential.
How to use it?
Use the GPS module to make a positioning system to monitor your location in real-time.
Specification
- Interface Type: UART
- Operating Voltage: 3.3V DC
- Dimensions: 31.5(L)*24.5(W)*13(H)m
Wiki & External links
Write Your Own Review
Bestselling Products You May Like





New Products You May Want





